Objective
After researching a NASA competition called Lunabotics with a few similarly motivated engineers, we decided to found the Lunabotics team within Northwestern Stars Space-Tech. Since February of 2025, we have been working tirelessly to research and produce the beginnings of a Lunabotics Rover.
Our goal is to create a lunar rover capable of autonomously excavating regolith (moon dirt, sort of) and depositing it into a berm (moon wall, kind of).
I have been the Team Lead and Project Manager since March of 2025.
Early Stages
The earliest stages of the project consisted of research. I organized various meetings with other Lunabotics teams that had competed in the past to gather information about the project and design process.
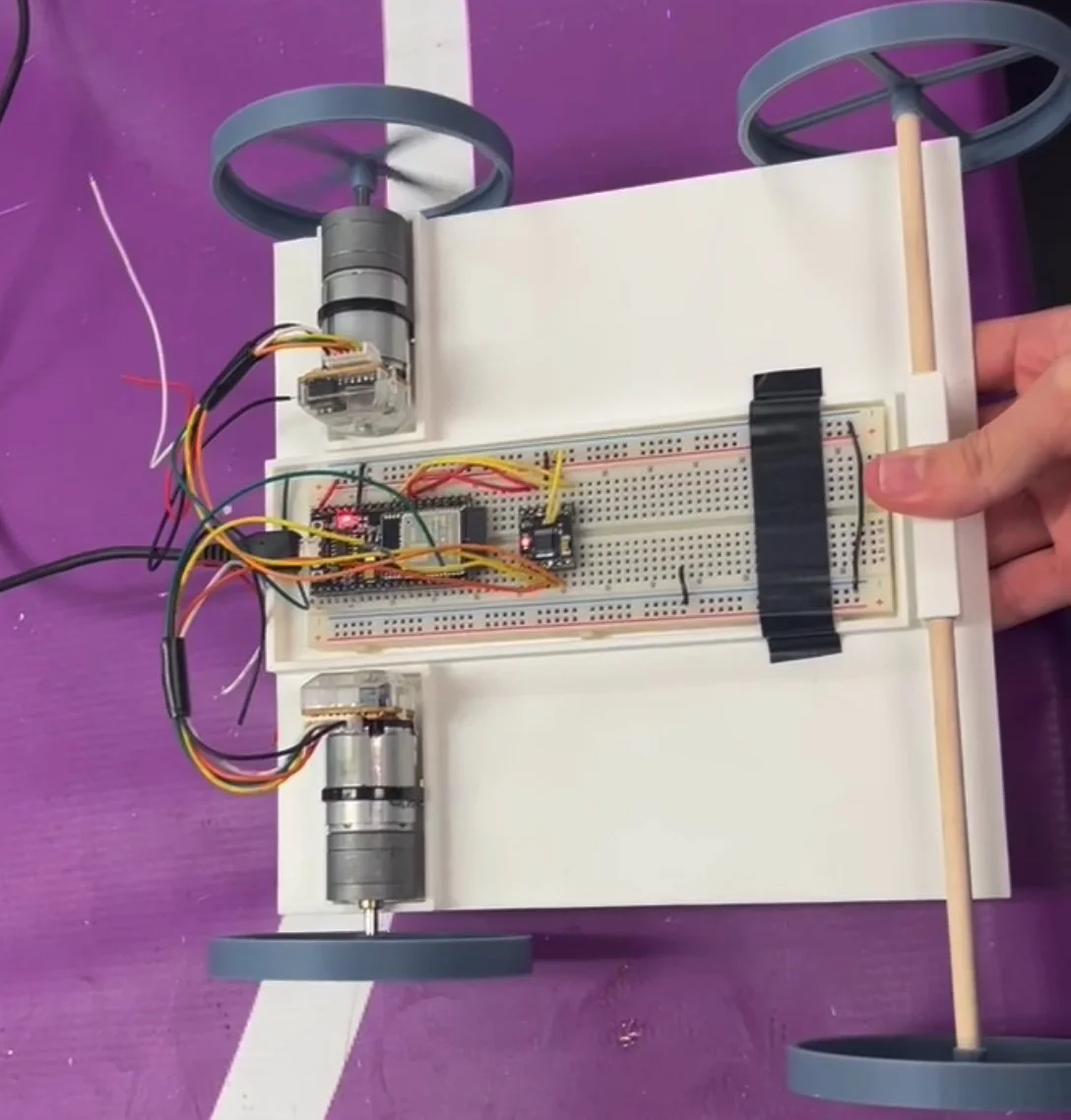
Once we had a confident understanding of the 24/25 project, I began shooting for an early stage “Proof-of-Life” concept rover to start conceptualizing.
Once the team managed to make a remotely controlled 3D printed chassis prototype (seen above), we moved onto making design choices for the 25/26 rover.

First 3D printed wheel mockup with motor testing
Making Decision
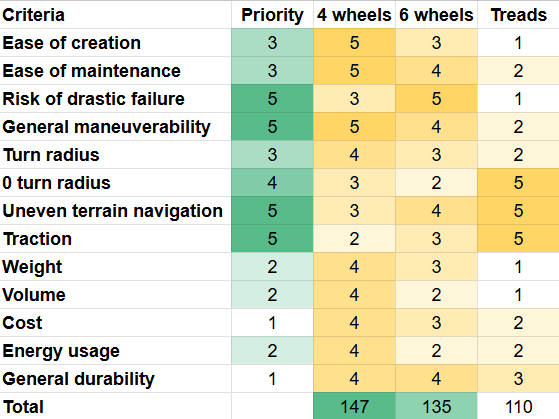
Once most of our team went remote for the summer, I hosted weekly team meetings over zoom to maintain team growth. After combining our personal research and information from other teams, we began creating decision matrices based on the research to decide on number of wheels, the frame design, and our excavation style.
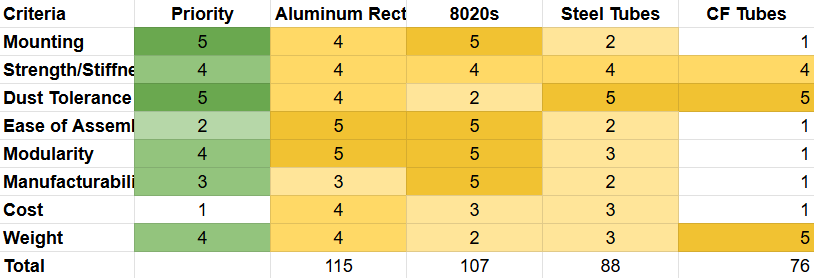
Our team collectively decided that a 4-wheeled rover with an aluminum rectangular beam would be the best combination for our drivetrain.
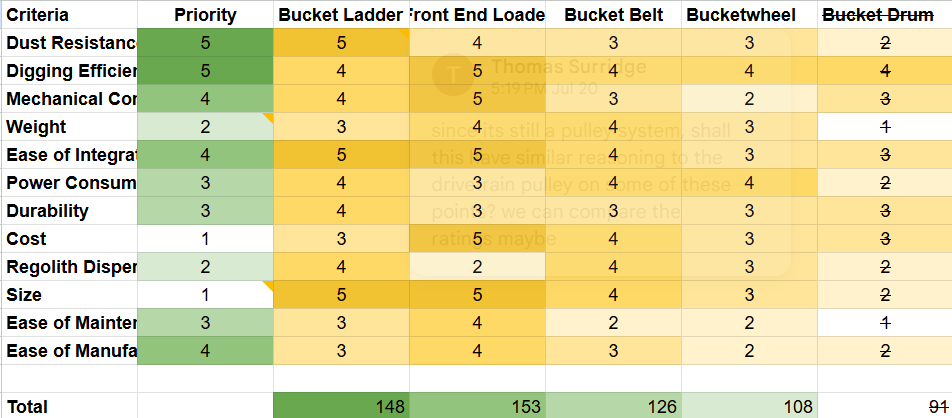
The design will aim to have a front-end-loader excavation design.
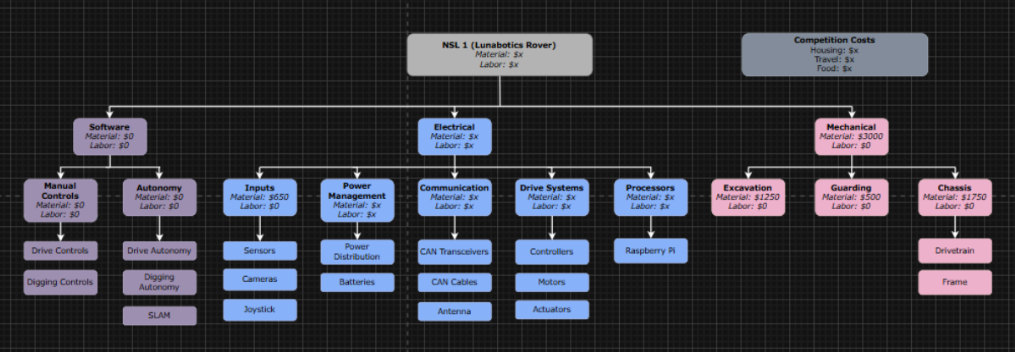
Stage 2 System Hierarchy with Mechanical Budget Estimates
Administrative Work
I created an early-stage system hierarchy to guide our design.
The project application requires a system hierarchy and project timeline leading up to the competition May 2026. It also requires a budget estimation based on initial design considerations.
I have recently finished and submitted the 2025/2026 Lunabotics Application. Here is the link to the PDF of the Project Management Plan that I wrote for the application.
Mechanical progress was halted not only due to the summer, but also due to the project guidebook release! We have officially received the 2025/2026 Lunabotics Guidebook and will be commencing the design of our front-end-loader soon.
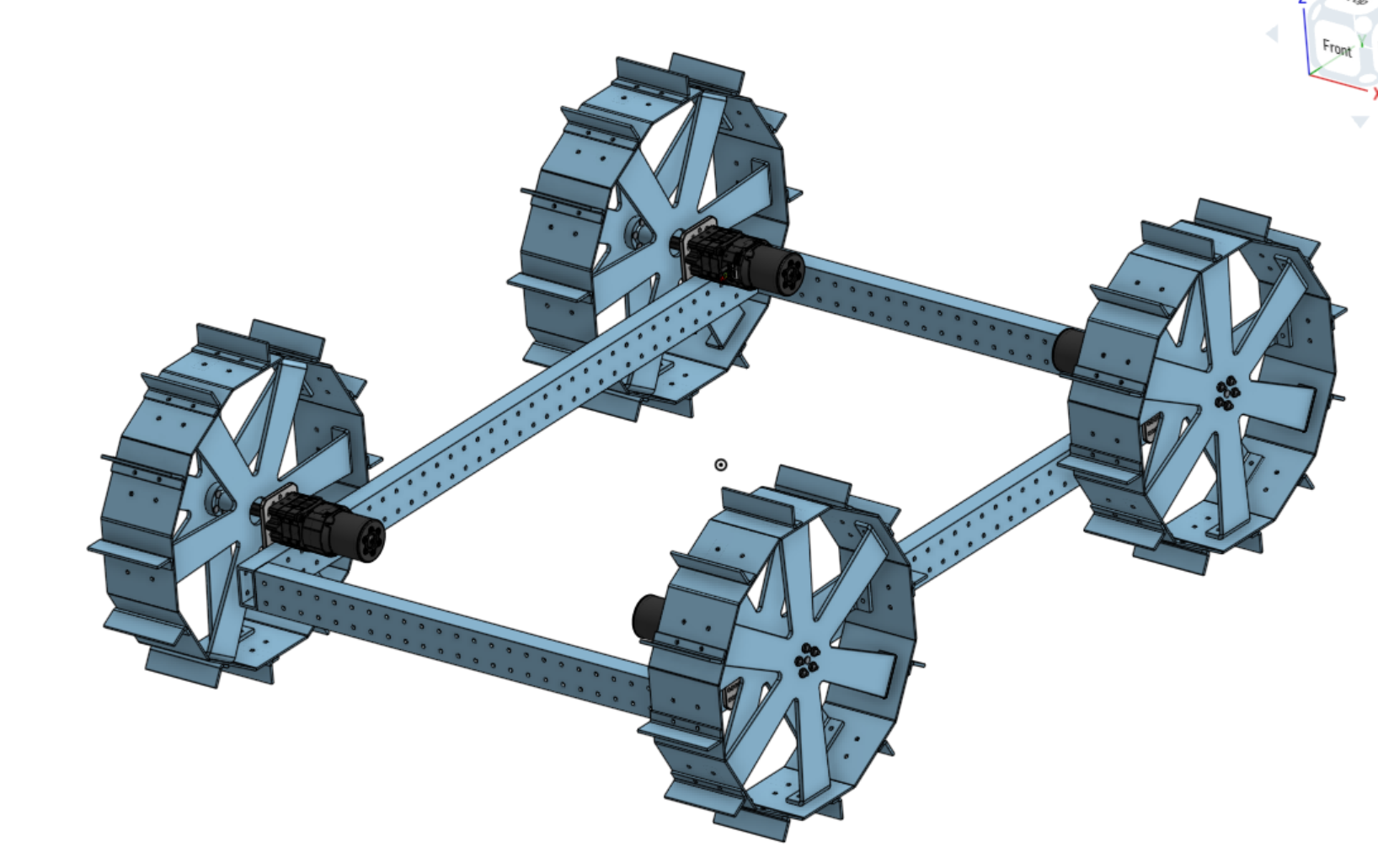
In the meantime, our team has successfully designed and manufactured competition wheels and a frame which will soon be combined for a chassis test drive!
Last Updated September 2025
More updates to come!

Competition Wheel (No grousers)